Engineering
The Platform
A ground-up design built for real-world autonomous surface operations. Every subsystem engineered for reliability, modularity, and scalable deployment.
Hardware
Benchtop Prototype
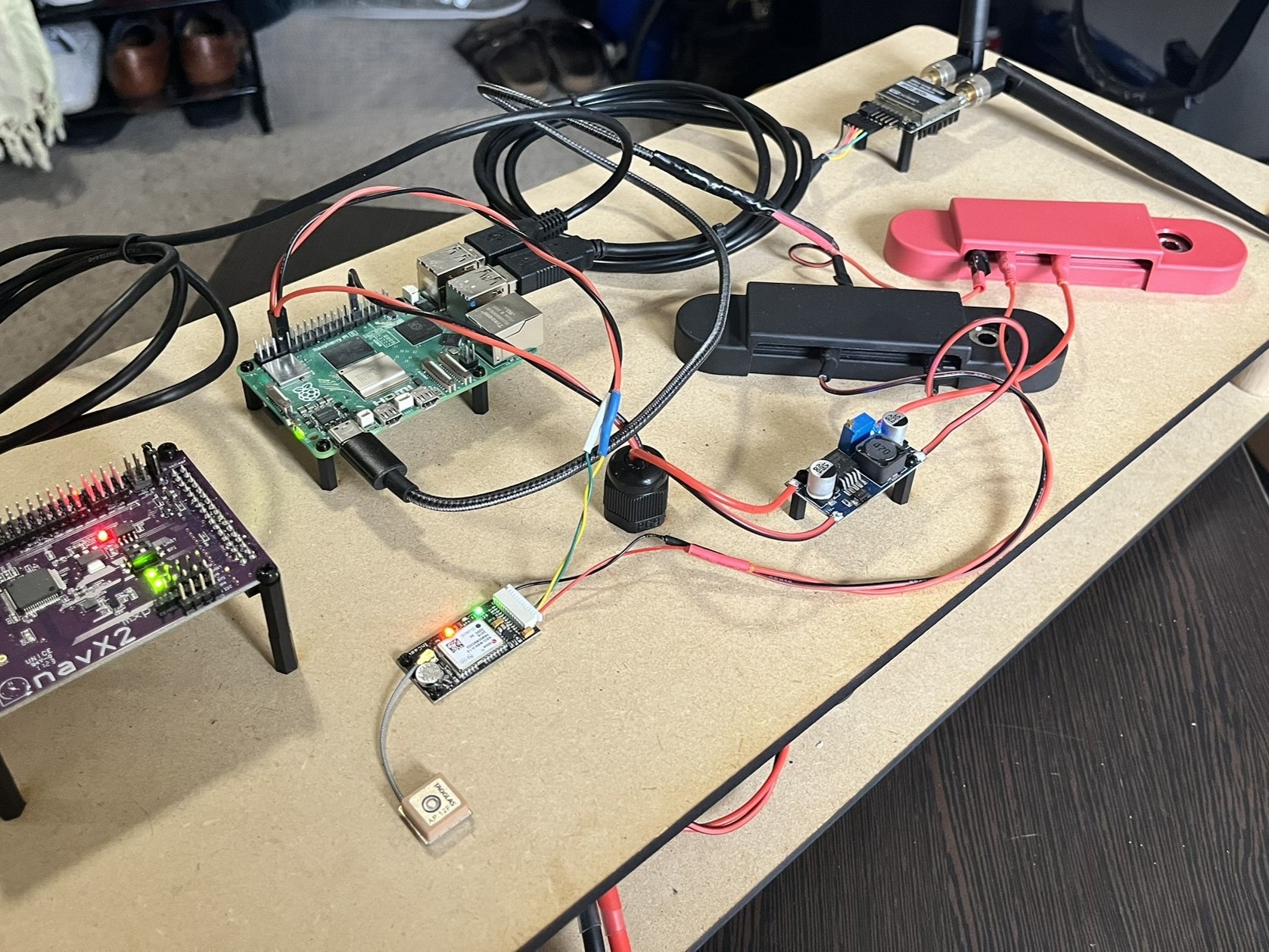
GT-ASV-001 // Benchtop Prototype // Active Development
Status
Working Prototype — Active Development
The current benchtop prototype validates core subsystem integration: power distribution, embedded compute, sensor interfacing, and motor control. Hardware-in-the-loop testing is ongoing.
Platform Type
Benchtop Test Stand
Compute
Raspberry Pi 5
Propulsion
Differential Thrust Configuration
Power
14.8 V / 16000 mAh LiPo Battery
Sensors
NAV X2 IMU / NEO M8N GNSS
Comms
RFD900x LoRa
Build Status
✓ Prototype Complete
Design
CAD Model
The CAD model is a 1:1 representation of the physical prototype, designed for manufacturability and modular reconfiguration.
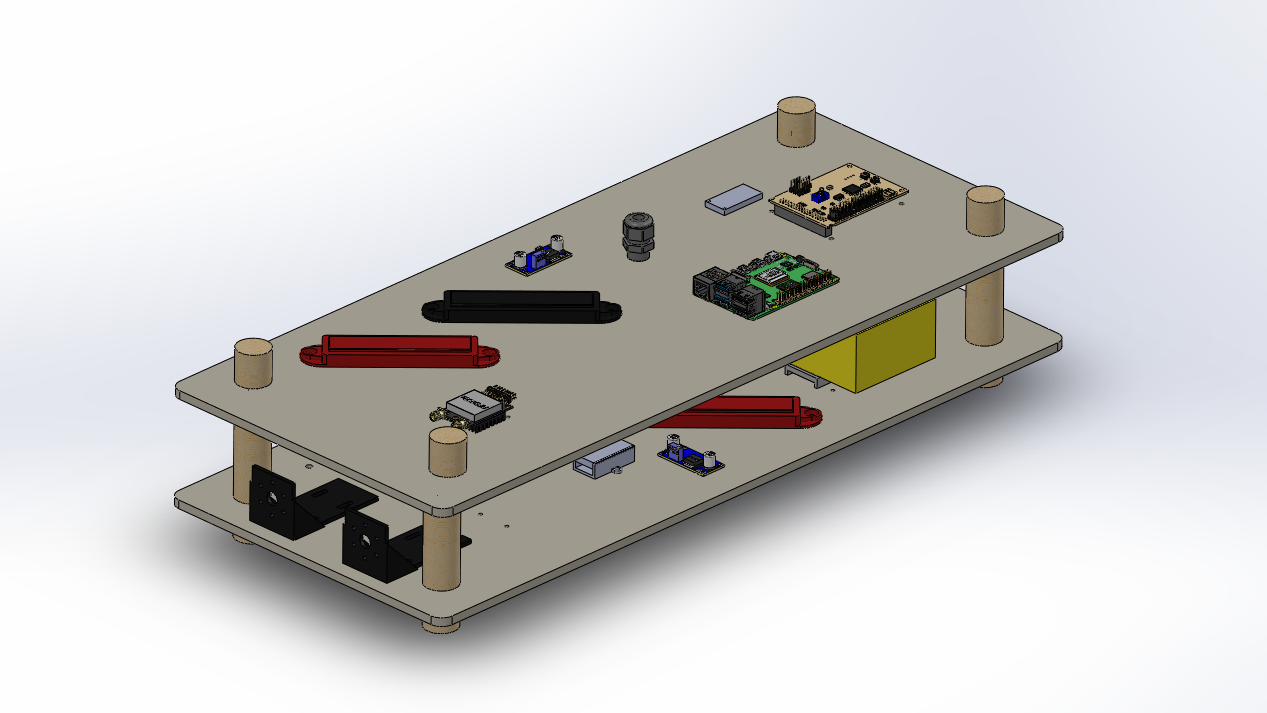
Isometric View
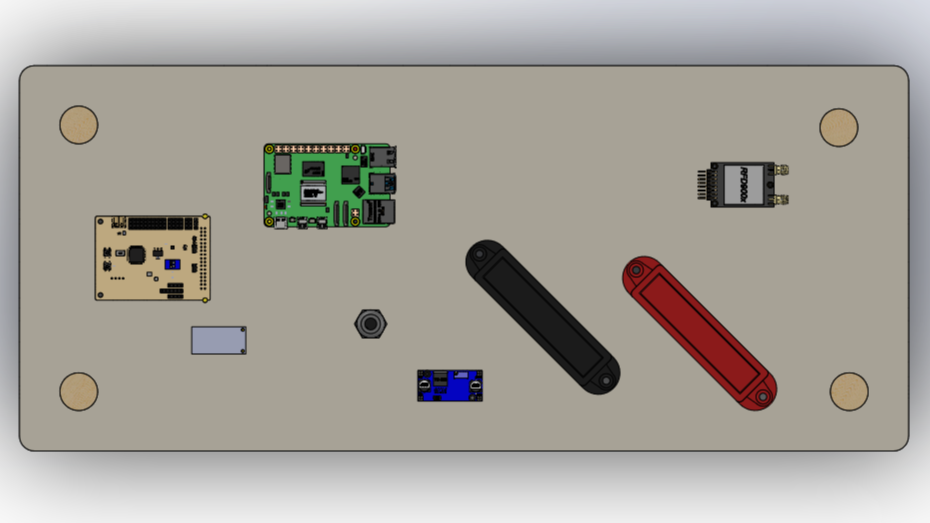
Top Layer
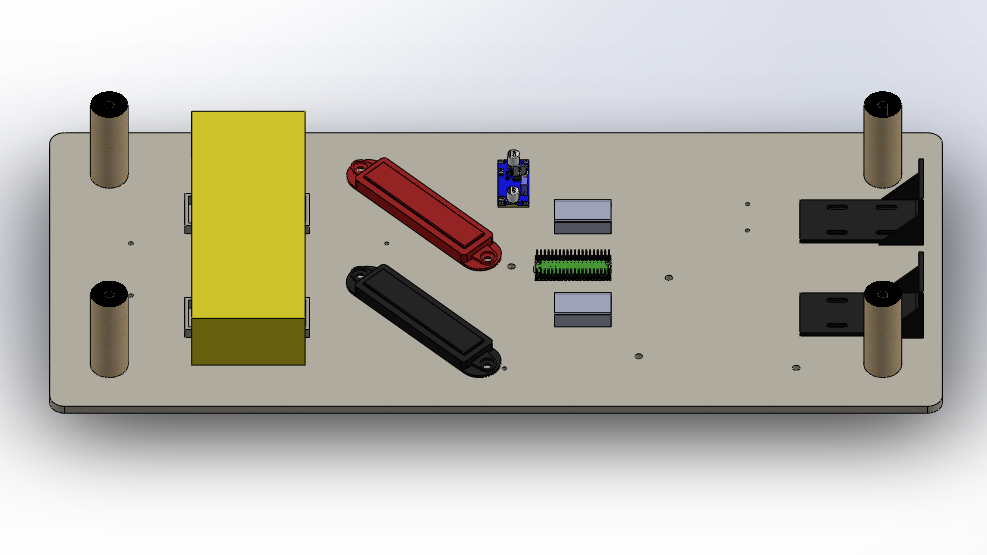
Bottom Layer
Development
Roadmap
✓
Phase 01 — Complete
Benchtop Prototype
Core subsystem integration validated. Power, compute, sensors, and motor control operating as an integrated system on the bench.
→
Phase 02 — In Progress
Bench to Water
First fully integrated, water-test-ready prototype, developed directly from a benchtop tech stack with demonstrated hardware and software capabilities.
03
Phase 03 — Planned
Autonomous Navigation Demo
Full waypoint mission execution with onboard obstacle avoidance. First end-to-end autonomous run for investor and partner demonstration.
04
Phase 04 — Planned
Multi-Node Swarm Operations
Coordinated autonomous operation across multiple vehicles using mesh network communication, distributed tasking, and shared situational awareness.